
舵机怎么编程
如何编程舵机
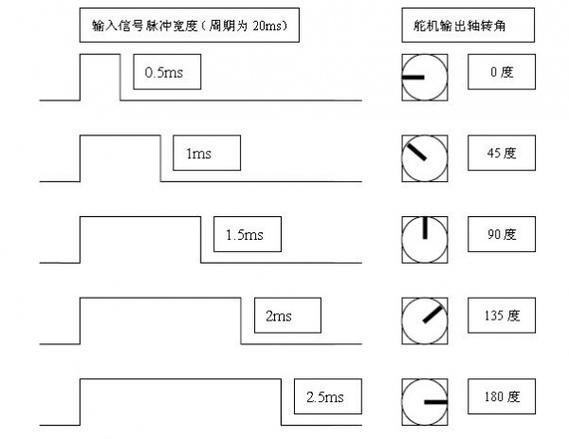
舵机是一种常见的执行器,通常用于控制机械臂、小车舵机以及航模中的各种动作。要编程舵机,可以选择使用单片机或者微控制器来进行控制。以下是一些编程舵机的基本步骤:
你需要准备一个舵机和一个控制器(比如Arduino等)。将舵机的信号线连接到控制器的一个数字引脚,而电源线和地线连接到相应的电源引脚。
你需要编写控制舵机的代码。以Arduino为例,以下是一个简单的舵机控制代码:
```cpp
include
Servo myservo; // 创建舵机对象
void setup() {
myservo.attach(9); // 将舵机连接到数字引脚9
}
void loop() {
myservo.write(0); // 将舵机转到0度
delay(1000); // 等待1秒
myservo.write(90); // 将舵机转到90度
delay(1000); // 等待1秒
myservo.write(180); // 将舵机转到180度
delay(1000); // 等待1秒
}
```
这段代码使用Arduino的Servo库来控制舵机转动到不同的角度,并在每个角度停顿1秒钟。
将你编写好的代码通过USB线上传到控制器中。确保控制器的串口通信设置正确,然后点击上传按钮。
当你的舵机动作不如预期时,可以通过修改代码中的角度值、延迟时间等参数来进行调试。也可以尝试不同的舵机控制库或算法来优化舵机的运动。
- 在连接舵机时要注意电源电压和电流的要求,避免损坏舵机或控制器。
- 避免过载舵机,不要让舵机超出其额定转动范围,以免损坏。
- 在测试舵机运动时,可以用手轻轻拉动舵机杆来检查是否有异常。
通过以上步骤,你就可以成功地编程舵机了。希望这些信息能帮助到你!
免责声明:本网站部分内容由用户自行上传,若侵犯了您的权益,请联系我们处理,谢谢!











